Hardware Specifications
Swappable Arm
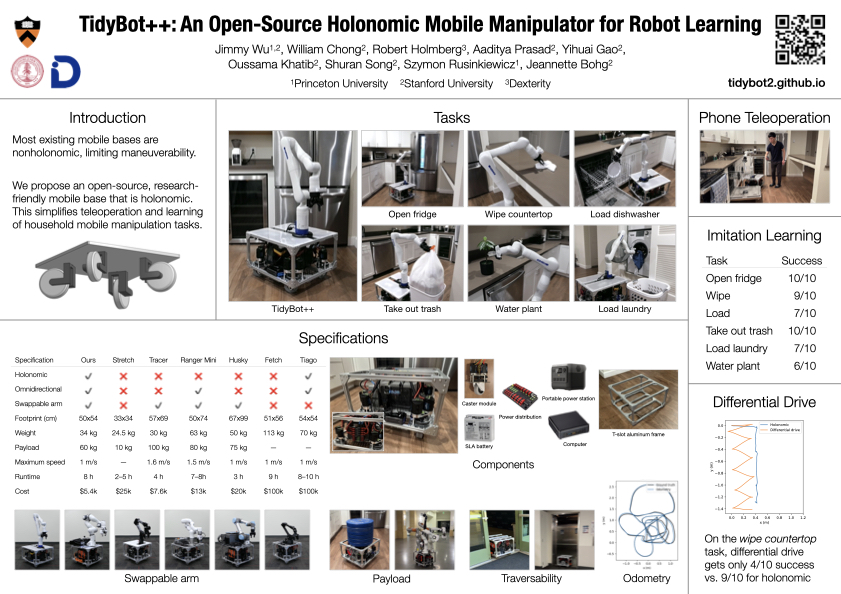
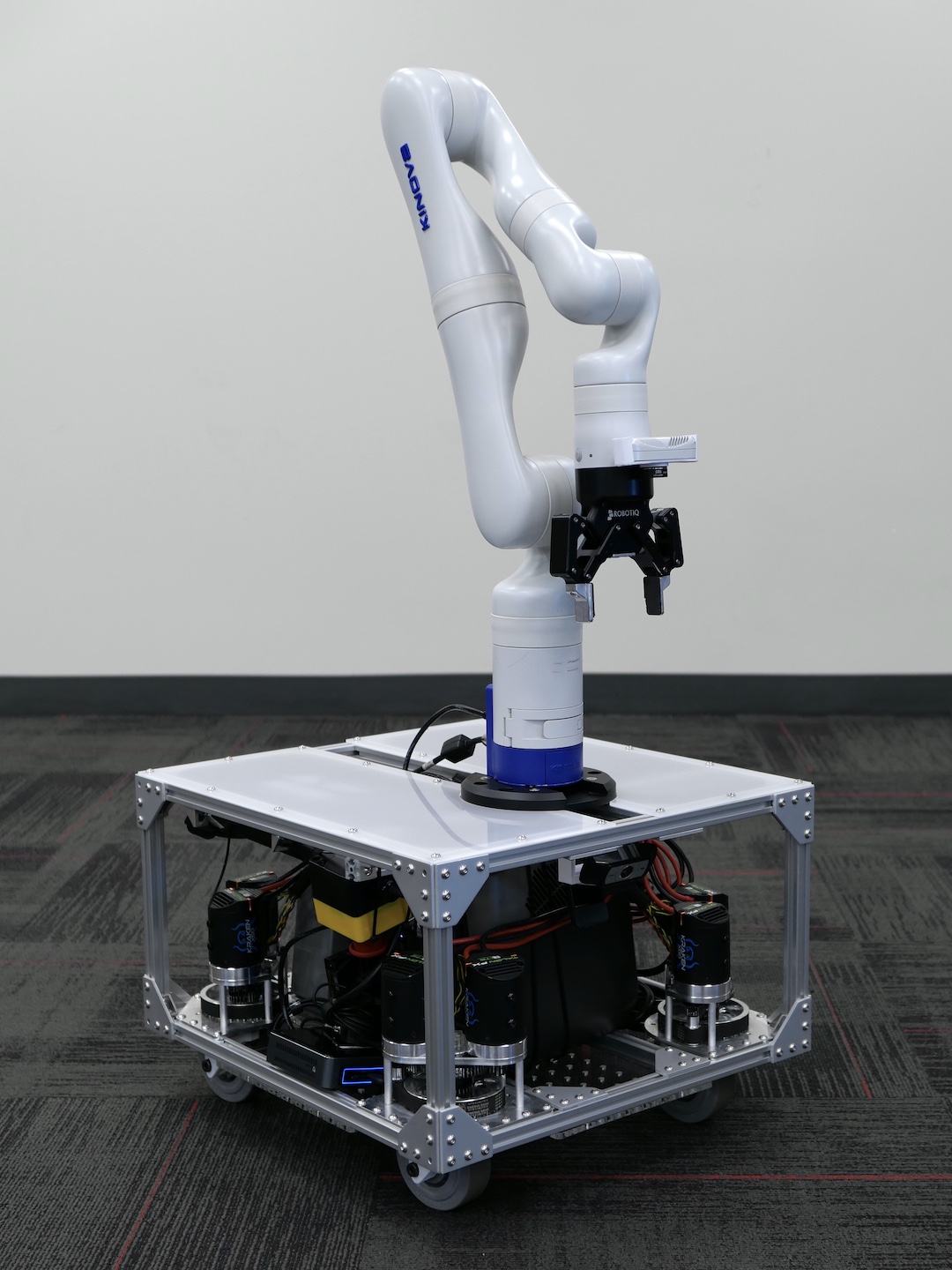
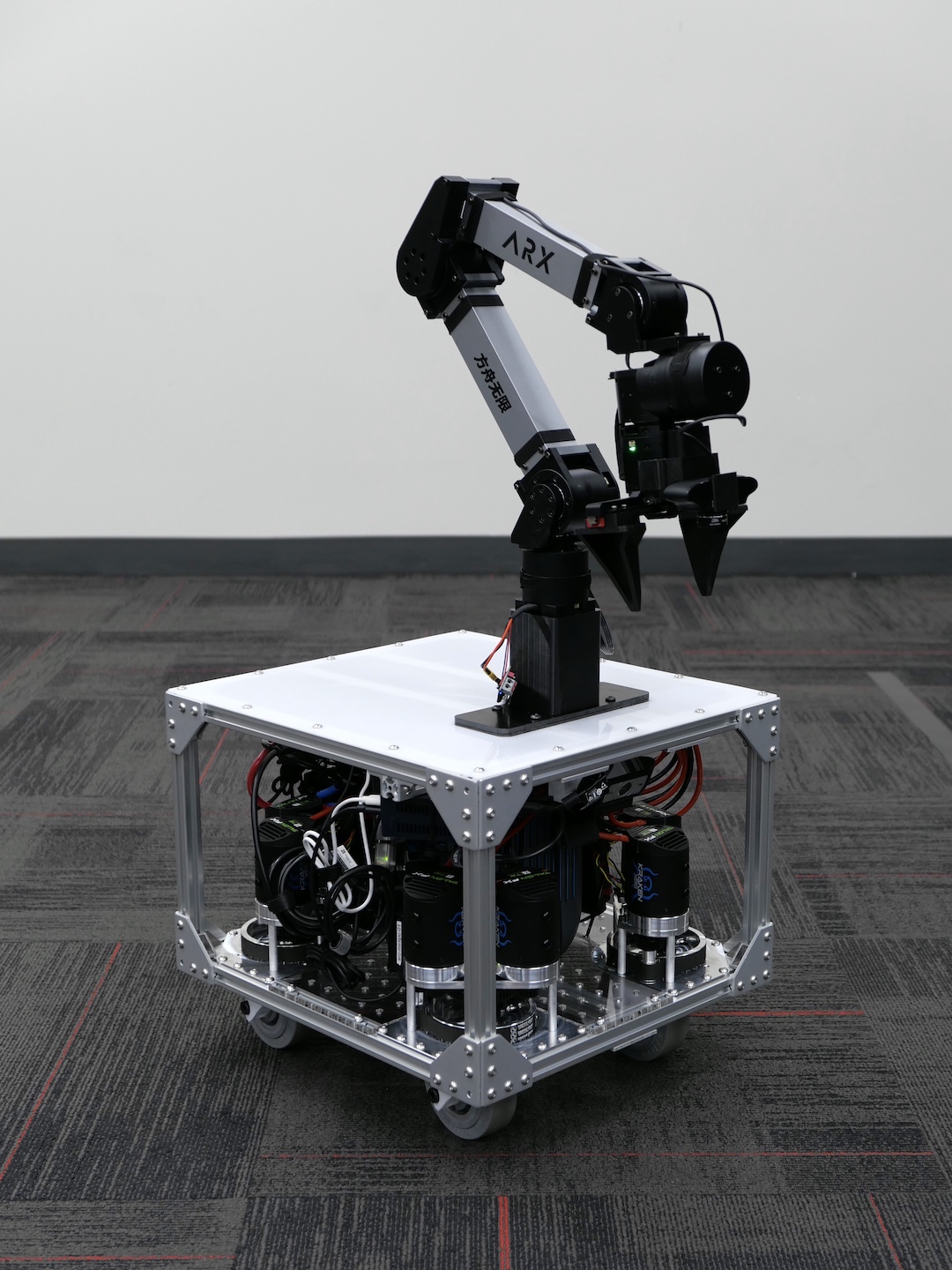
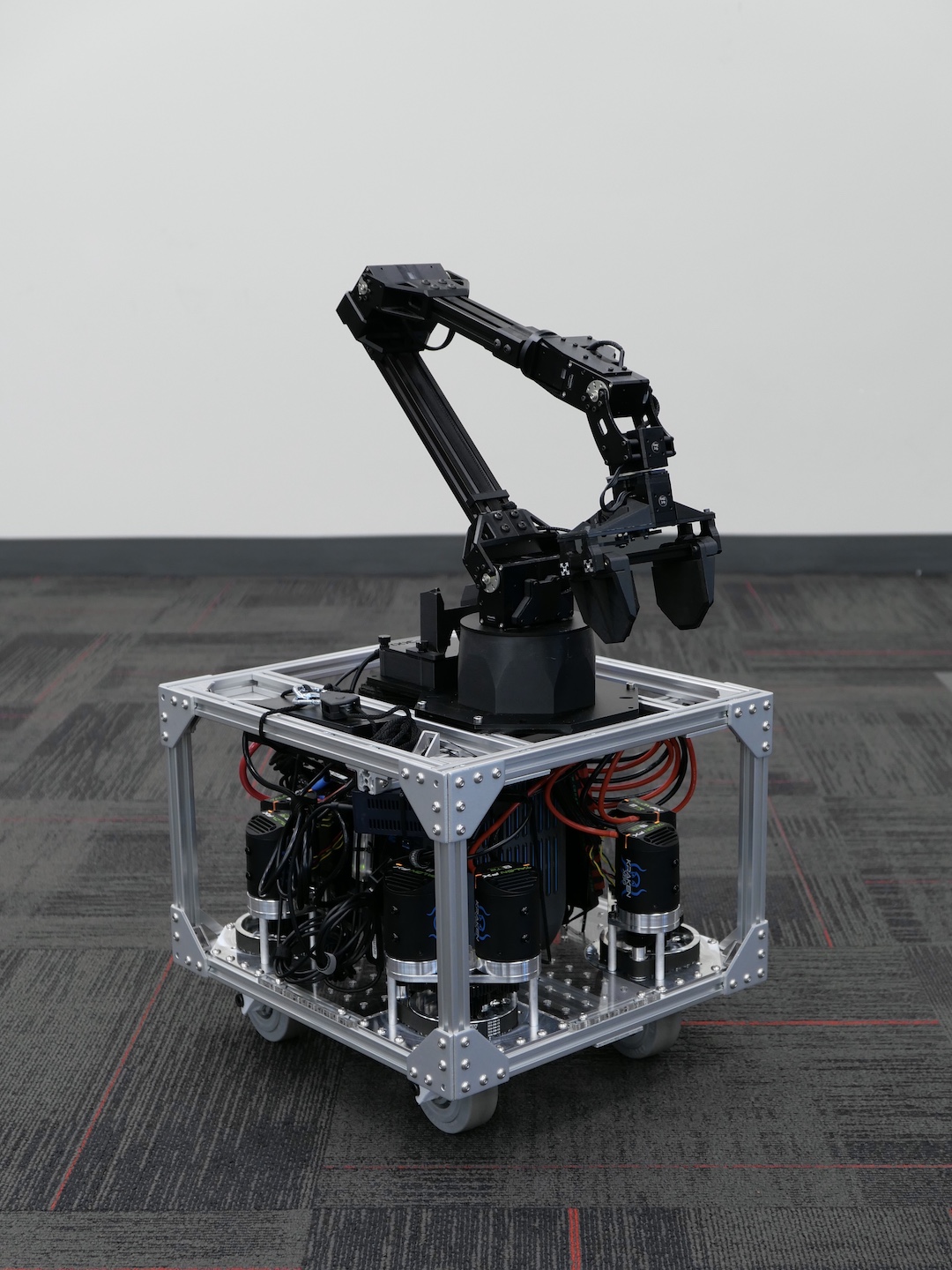
We provide several highly-customizable reference robot designs which can be easily modified to support different arms.
Kinova

Franka
ARX5
xArm

UR5
ViperX
Payload
Though designed to carry just one arm, we found that our mobile base can also handle much higher payloads with ease.
Weight plates totaling ~270 lb (120 kg)
Five arms totaling ~200 lb (90 kg)
Passenger weighing ~150 lb (70 kg)
Traversability
Our mobile base works on a variety of floor surfaces ranging from hard floor to high-pile carpet, and can traverse many common floor obstacles. Though intended for indoor use, we found that it can handle some outdoor floor obstacles as well.
Door thresholds
Elevator gaps
Speed bumps
Steel construction plates
Asphalt curb ramps
Loading ramps (6.5° inclination)
Odometry
We evaluated the odometry accuracy by driving our mobile base along a random trajectory and comparing the odometry data (dashed blue line) with motion capture (black line). The results show translation drift of less than 1 cm per meter of distance traveled, and rotation drift of less than 1° per 360° of rotation.
Repeatability
One advantage of a holonomic mobile base is that it can be directly controlled in position mode, leading to high repeatability. To test this, we recorded the demonstration shown below (4x speed) for the push chairs task and replayed it 10 times. We found that simple open-loop replay from a fixed initial configuration achieves 10/10 success for this task.